Today I started to do some tests to calculate microDrum latency. I used a Behringer UCA 222 sound card as an oscilloscope , the software “Electroacoustics Toolbox” to analyze the signal and, for convenience, a MIDI Thru Box to split the output of the microDrum (this have certainly introduced a delay). I have connected an input between the piezo and the microDrum and the other input to one of the outputs of the MIDI Thru Box. I did several tests using various pads and different values of Scan Time. The Scan Time is the time in milliseconds where the microDrum analyzes the signal before sending a MIDI note. The first question that I have done is, how much time elapses from when the microDrum ends to sample the signal and when the MIDI note is sent?
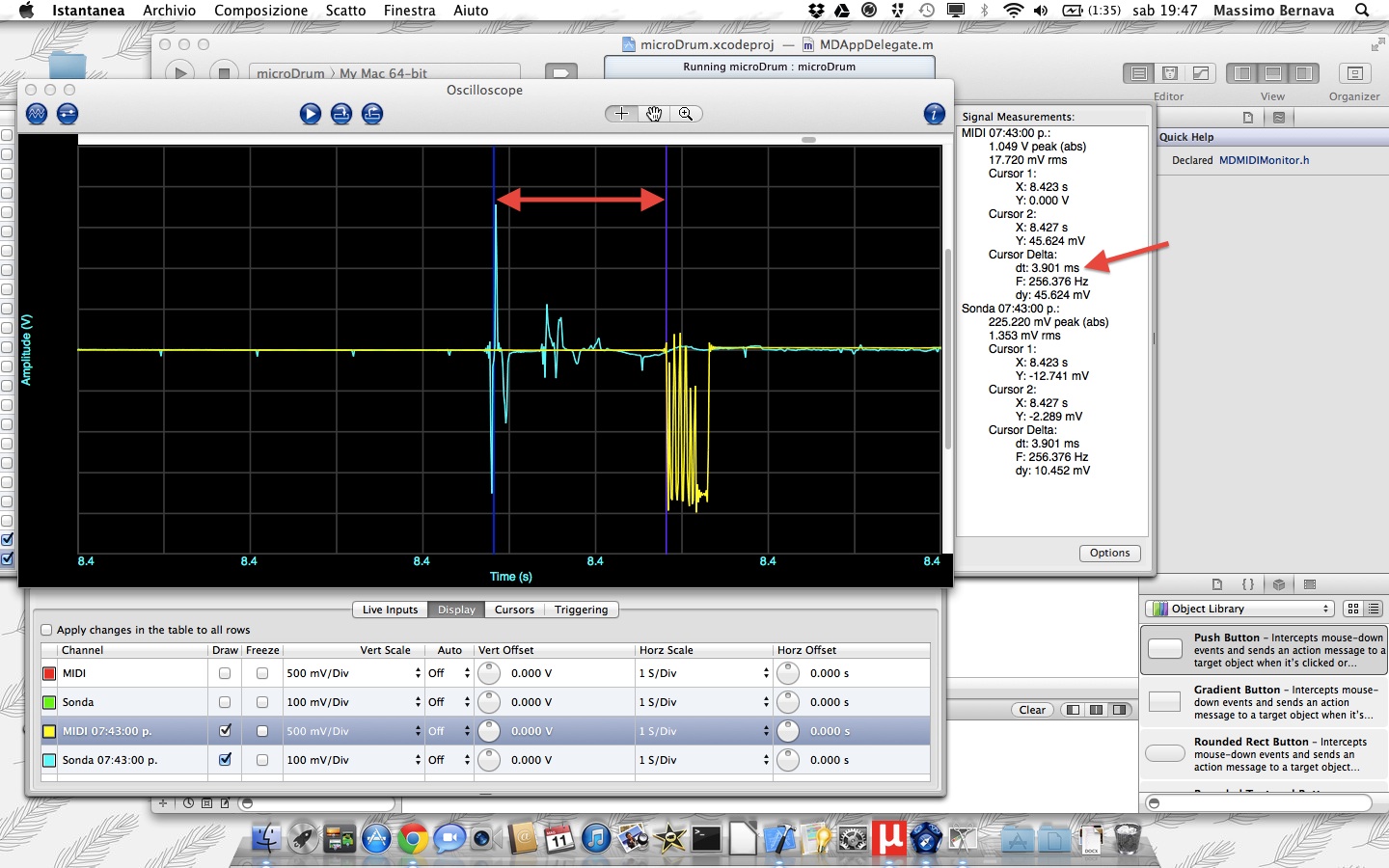
In all the tests this value is less than 1 ms. In the photo I used a Red Shot Trigger DDRUM and I set the value of the Scan Time 3 ms (as you can see it would be enough less). By analyzing the signals, the distance between the two fronts is 0.9 ms. It seems to me a very good result. Soon I will do the tests using an Arduino Due with 84 MHz ARM processor.Oggi ho cominciato a fare dei test per calcolare la latenza della microDrum. Ho usato una scheda audio Behringer UCA 222 come oscilloscopio e il software “Electroacoustics Toolbox” per analizzare il segnale e, per comodità, una Midi Thru Box per sdoppiare l’output della microDrum (questo avrà sicuramente introdotto un ritardo). Ho collegato un ingresso tra il piezo e la centralina e l’altro ingresso ad una delle uscite della Midi Thru Box. Ho fatto varie prove usando vari pad e differenti valori di Scan Time. Lo Scan Time è il tempo in millisecondi in cui la microDrum analizza il segnale prima di inviare una nota MIDI. Migliore è la qualità del pad più questo valore può essere piccolo. La prima domanda che mi sono fatto è, quanto tempo passa da quando la microDrum finisce di analizzare il segnale a quando il segnale viene inviato?
In tutti i test questo valore è inferiore a 1 ms. Nell’esempio della foto ho usato un Trigger Red Shot DDRUM ed ho impostato il valore dello Scan Time a 3 ms (come si può vedere sarebbe bastato meno). Analizzando i segnali la distanza tra i due fronti è di 0,9ms. Mi sembra un ottimo risultato. A breve farò i test usando un Arduino Due con processore ARM da 84 MHz.

